
-
-
2021-04-08 異動電動機和同步電動機如何區分?
有很多電工朋友在日常工作生活中,會遇到很多種不同類型的電動機,比如直流電機、步行電機和伺服電機等等。其中交流電機還可以分為異動電動機和同步電動機兩種,那么同步電動機和異步電動機到底有什么區別呢?下面就為大家監督介紹一下:
-
-
2021-04-05 什么情況下使用步進電機?
步進電機是一種將電脈沖轉化為角位移的執行機構。通俗一點講:當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度。你可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度,所以在需要準確定位或調速控制時均可考慮使用步進電機。
-

-
2021-03-31 無刷電機和有刷電機的區分
電機的分類有著自己自成一套的體系。按照不同的性質和功能電機分類顯而易見。電機的多個分支分類中有些特殊的電機類型無論是從外在上還是從功能上都很難辨別。 有刷電機在電機工作時,線圈和換向器旋轉,磁鋼和碳刷不轉,線圈電流方向的交替變化是隨電機轉動的換相器和電刷來完成的。在電動車行業有刷電機分高速有刷電機和低速有刷電機。有刷電機和無刷電機有很多區別,從名字上可以看出有刷電機有碳刷,無刷電機沒有碳刷。無刷電機是升級產品,其壽命性能比有刷電機好。但其控制電路比較復雜,對元件的老化篩選要求比較嚴格。雖然電機壽命長但控制電路容易出毛病。因此選用無刷電機要經過嚴格的可靠性試驗以確保質量。,但是隨著技術的不斷升級幾步,無刷電機技術已經相當成熟。
-

-
2021-03-25 怎么樣計算電動機功率
-

-
2021-03-22 編碼器的增量型和絕對值型主要是什么區別啊?能相互替換嗎?
絕對的可以直接應用,而增量的必須經過計算處理才能得到 增量式編碼器 是對采樣值得前后兩個值的差值(不是絕對數值)進行編碼.而絕對編碼器是對絕對數值(不是相對數值)進行編碼.比如x[1]=2,x[2]=9 增量式編碼器對9-1=8編碼得到1 .絕對編碼器得到010和101.
-

-
2021-03-20 兩步搞定絲桿步進電機選型,這就是工資高的原因
絲桿步進電機,實現旋轉運動到直線運動的轉換,大大節省了零部件的采購成本和系統組裝時間,有效解決了因多次轉接造成的精度損失,提高了結構空間的利用率和定位精度。將運動的轉換過程在電機本體完成,不再需要皮帶、齒輪齒條、聯軸器和其他機械部件。定制如防水防塵、高重復定位精度、加裝剎車、編碼器、滾珠絲桿、空心軸等要求。電機最大推力可達 2270N。混合絲桿步進電機有六種尺寸,外形尺寸從20mm至86mm,每一尺寸有三種結構可選:外部驅動式、貫通軸式和固定軸式。
-
-
2021-03-18 廠家資深工程師解答步進電機常見疑惑
一、如何控制步進電機的方向? 1、可以改變控制系統的方向電平信號。 2、可以調整電機的接線來改變方向,具體做法如下: 對于兩相電機,只需將其中一相的電機線交換接入驅動器即可,如A+和A-交換。 對于三相電機,將相鄰兩相的電機線交換, 如:A,B,C三相,交換A,B兩相即可
-

-
2021-03-12 電機的什么情況下需要配減速機
第一,就是伺服電機的轉速要求非常低的情況下,比方說轉速要達到10rpm,而且,要求此時滿轉矩輸出的話,且長時間工作的話,此時,僅靠伺服本身是無法勝任,就需要配減速機。 第二,就是在變頻器要求轉速較低,而且扭矩要求比較大的情況下,也可以通過減速機來實現。比方說,對伺服系統的轉速沒有啥特別的要求,但是,對伺服電機的要求比較大,現在的伺服電機額定扭矩為4N*M,而系統要求達到12N*M,此時,就可以加減速機來實現,一般情況下,加3:1,或者是5:1的減速機,就可以滿足系統要求了。
-

-
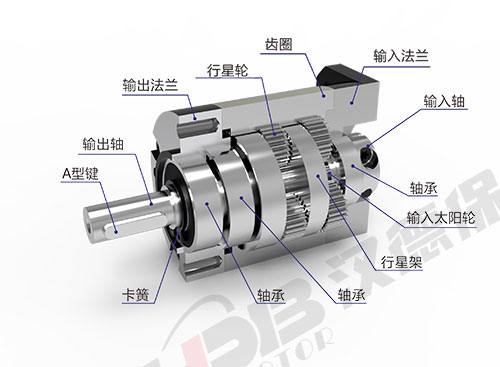
2021-03-11 電機為什么要搭配減速機?行星減速機有什么作用?
減小轉速作用,減速機,顧名思義,首選功能就是減速,其主要針對的減速對象就是電機,無論是伺服電機還是步進電機,都是一樣的效果,因為在電機的很多實用場合中,我們很難完全去使用電機的額定轉速,因為這牽涉到很多其它的功能需求和匹配的原則,所以我們會對電機的轉速進行減速,通過減速機來減速是一個很常規的做法。 2、增大扭矩作用,減速機確實是一個非常奇妙的東西,在減速的同時,他還可以相應的增大電機的輸出扭矩,這個功能對于設備研發人員來說,真的是太完美了,這就像你去京東買東西,商家不僅打折,還送你一-個大禮包,是不是很兩全其美的事情,減速機就是這樣一個好東西。 阿基米德曾經說過:給我一個支點我可撬動整個地球。其實你也可以說:給我一個減速機,我可以用- -根手指轉動整個地球。
-
-
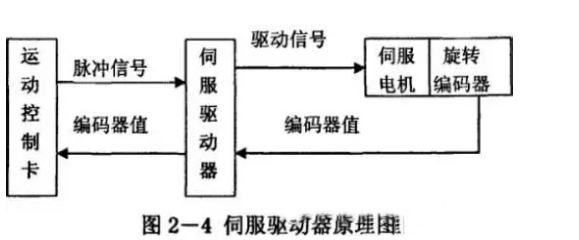
2021-03-10 什么是伺服電機?伺服電機的工作原理
伺服是什么?其實,伺服就是一個電機,和控制這個電機的驅動器。電機就叫伺服電機,驅動器自然叫伺服驅動器,‘伺服’源自于控制,精確控制的代名詞。——很顯然,為了控制電機,精確控制電機,專門研發出“伺服”這樣的一種系統。到此,可能很多人會奇怪:控制個電機為什么要做個這么復雜的系統呢?這不得不引入電機應用、原理以及發展的一些信息了。
-
-
2021-03-08 傳統電機,步進電機,伺服電機的區別和選用原則
1、從成本考慮 傳統電機<步進電機<伺服電機 2、從電機轉速要求考慮 傳統電機轉速范圍寬但調速不精確且不平滑,并且隨轉速降低功率也會降低,隨之帶來的是轉矩降低;步進電機對轉速要求更加苛刻,轉速過低時會出現抖動和爬行現象,速度高時扭矩會大幅度降低,所以步進電機僅適用于中速運行情況。 伺服電機在轉速方面優勢很明顯,基本沒有明顯的弱點。 3、從控制精度考慮 傳統電機因為是模擬量控制所以精度無法保證,步進電機和伺服電機是數字信號控制其精度要遠高于傳統電機,但是伺服電機自帶編碼器實現內閉環控制能有效的減少掉步的情況,并且通常情況下伺服電機步距角要遠小于步進電機因此精度更高。
-
-
2021-03-03 電機常見十三個異常問題,很實用
3、電機為什么不宜輕載運行? 電機輕載運行時,會造成: (1)電機功率因數低; (2)電機效率低。 會造成設備浪費,運行不經濟。 4、電機過熱的原因有哪些? (1)負載過大; (2)缺相; (3)風道堵塞; (4)低速運行時間過長; (5)電源諧波過大。
-

-
2021-03-02 電機編碼器是什么?有什么作用?
編碼器里面主要有兩個部分,一個是碼尺一個是碼盤,它們背后對應的就是編碼程序,在碼盤上的每一個刻度上都對應著相應的代碼,當位移產生以后,編碼器就會將位移信號轉化成代碼信號傳輸給電腦。 從接觸狀況來說,編碼器一般分兩種,一種是接觸式的,另外一種是非接觸式的,非接觸式采用的就是光感原理。
-

-
2021-03-01 什么是直線電機?為什么會廣泛應用在工業自動化設備?
直線電機可以看作是沿徑向平面切割并展開的旋轉電機,由此產生的直線伺服電機是一種電磁直接驅動直線電機,可以產生線性運動,不接觸零件,消除齒隙、纏繞、磨損和維護問題。直線運動不需要氣動、液壓缸,也不需要通過齒輪箱、主軸、皮帶、齒條和小齒輪或螺釘將旋轉運動轉換為直線運動。直線電機目前用于機器人、執行機構、精密工作臺/工作臺、光纖和光子學對準和定位、裝配、拾取和放置系統、機床、半導體設備、電子制造、需要高帶寬響應控制的檢測系統、視覺系統和許多其他工業領域運動控制應用。
-
-
2021-02-04 判斷電機好壞的方法
1、用萬用表測量電機三相繞組的直流電阻,三次測量的結果越接近越好,在2%以內繞組電阻合格,相差10%以上時,電阻小的一相可能發生了匝間短路。 2、用500v絕緣搖表測量三相繞組相間絕緣電阻和對地(對機殼)絕緣電阻,長期存放的電機各項絕緣電阻要0.5兆歐以上為好電機,可以使用。0.1兆歐以上不足0.5兆歐說明電機已經受潮,要烘干處理后才可以使用。絕緣電阻很低的說明絕緣已經損壞。 3、轉動電機轉子,應該輕松自如,并且沒有雜音和摩擦聲,說明軸承和氣隙正常。

