
步進電機閉環控制系統
步進電機閉環控制系統,步進電機基本上以開環電路驅動,用于位置控制。換句話說,步進電機以外的電機尤其是高精度的步進電機之外并沒有做開環控制定位的,而用開環電路驅動的電機只有步進電機。例如無刷電機,首先為切換相,需要測出轉子位置,需要含位置傳感器的位置閉環電路。而且如果按一定速度驅動,需測出轉子的速度,此為速度閉環電路;如果想定位控制,需要含有轉子位置信號的編碼器等傳感器的閉環電路。與開環驅動的步進電機相比較,含傳感器的閉環電路成本較高。因此,步進電機被稱為速度控制或位置控制的低成本驅動系統。
步進電機的開環電路驅動在高速轉動時,有失步、振動(噪聲)以及高速運行困難等問題。為了彌補這些缺點,步進電機安裝角度傳感器,形成閉環控制,用以檢測并避免失步。步進電機的閉環控制方式大致分為兩種:
使激磁磁通與電流的相位關系保持一致,使其產生能帶動負載轉矩的電磁轉矩,這種控制電機電流的方式與無刷直流電機控制方式相同,稱為無刷驅動方式或電流閉環控制方法。
電機電流保持一定,控制激磁磁通與電流相位角的方式,稱為功率角閉環控制方法。功率角為轉子磁極與定子激磁相(或認為是同步電機的定子旋轉磁場軸線也可以)相互吸引所成的相位角。此功率角在低速時或輕載時較小,高速時或高負載時較大。引用前文開環控制的原理部分中的下圖所示,“杠A”相吸引轉子磁極,其次“杠B”相激磁時的角度有π/2,轉子磁極位于“杠A”相前緣(圖中轉子的S極位于A相的左側)時,使磁極“杠B”相開始激磁。
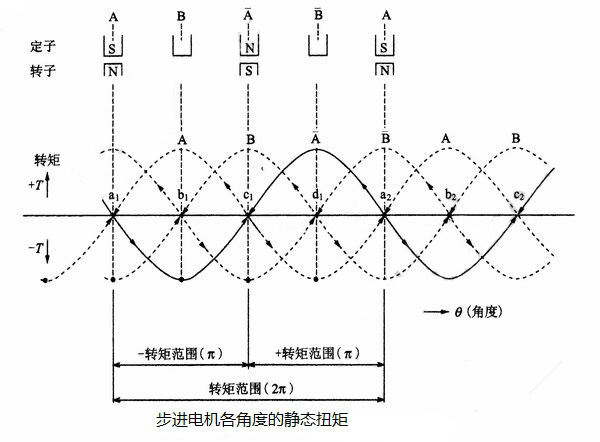
步進電機各電角度的靜態轉矩
為什么?因為高速時,受線圈電感的影響,使A相電流的關斷時間延長,B相電流上升時間也延長,因此,產生最大轉矩加速的角度,其值隨速度變快而變大。
同類文章排行
- 開環步進電機與閉環步進電機的區別
- 矢量圖格式有哪些?矢量圖是什么?
- 步進電機驅動器的常見故障與處理方法(一)
- 步進電機品牌廠家排行榜2022年【前十名】
- 無刷電機發明人李紅濤---無刷電機之父
- 步進驅動器的常見故障分析和解決辦法(二)
- 步進電機的參數有哪些?
- 步進電機驅動器的三種基本驅動模式
- 直流無刷電機除了在額定電壓外,能否在其他電壓下運行?
- 什么伺服電機需要加裝減速機才能使用?
最新資訊文章
- 57步進電機參數,57mm二相開環步進電機選型
- 步進電機帶剎車,抱閘步進電機的優勢特點
- 力矩的計算公式以及如何運算,精心整理值得收藏
- 1000線閉環步進電機和2500線閉環步進電機的區別和選型
- 工業級直流無刷電機的工作原理,整理于網絡僅供學習參考
- 三差分通道的42閉環步進電機,你了解多少?
- 了解步進電機工作原理,才能正確選擇步進電機
- 絲桿步進電機和步進電機的區別,主要在這兩點
- 步進電機和伺服電機的區別,各具特色,各領風騷
- 步進電機選型看這些,小白也能懂
- 關于二相步進電機,從5個方面給你講清楚
- ZPS115行星減速機
- ZSPLF90行星減速機
- ZSPLF60行星減速機選型
- 轉角輸出ZPS42行星減速機選型
- SPLF120行星減速機的選型
- SPLF90伺服行星減速機選型
- SPLF60伺服行星減速機的特點和選型介紹
- PS42行星減速機的特點和選型介紹
- 方形輸出的PLF60行星減速機

